|
| Appunti tecniche |
|
|
| Appunti tecniche |
|
| Visite: 1388 | Gradito: |
Leggi anche appunti:Progetto di tecnologie dei sistemi di automazione - impianto per la gestione di un magazzino intermedioPROGETTO DI TECNOLOGIE DEI SISTEMI DI AUTOMAZIONE Impianto Per Avvolgimenti indottiAVVOLGIMENTI INDOTTI Gli avvolgimenti indotti per le macchine rotanti si Fasce di van allenFASCE DI VAN ALLEN La presenza della fascia di van Allen era già stata teorizzata |
 |
 |
Come esposto nei capitoli precedenti il laminatoio è stato controllato mediante controllori Proporzionale - Integrale - Derivativo (PID) .
La regolazione dei parametri (KPs,KPc,KIs e KIc) non è stata effettuata tramite le usuali regole di Ziegler-Nichols, ma utilizzando un toolbox per i controlli non lineari messo a disposizione da Matlab® 6.5 e Simulink, l'NCD toolbox .
Del toolbox citato abbiamo utilizzato il blocchetto "NCD Output" tramite il quale è possibile regolare i parametri interessati tramite dei vincoli sull'uscita da controllare.

Figura 37. NCD Output block
Tale blocchetto trasforma l'uscita vincolata e simulata del sistema in un problema di ottimizzazione nella forma:
La variabile x denota la vettorizzazione delle variabili da regolare, xl e xu rappresentano i loro limiti inferiore e superiore. g(x) rappresenta la vettorizzazione dei vincoli di errore e w i pesi dei vincoli, lo scalare g impone un elemento di incertezza al problema, il quale altrimenti avrebbe un obiettivo troppo rigido da raggiungere.
In parole povere si cerca di minimizzare il massimo errore vincolato e pesato.
Questo tipo di problema di ottimizzazione è risolto tramite la procedura constr del toolbox di ottimizzazione. La procedura usa un metodo di Programmazione Quadratica Sequenziale (SQP) che risolve un problema di programmazione quadratica (QP) ad ogni iterazione. Ad ogni iterazione, la procedura aggiorna una stima dell'Hessiano del Lagrangiano. La linea di ricerca è ottimizzata utilizzando una funzione di merito. La routine utilizza un insieme di strategie attive per risolvere il sottoproblema QP.
L'implementazione del sottoproblema SQP prova a soddisfare le equazioni di Kuhn-Tucker, le quali sono condizioni necessarie per l'ottimalità di un problema di ottimizzazione vincolata.
L'idea principale dell'algoritmo SQP genera un problema QP ad ogni iterazione basato sull'approssimazione quadratica della funzione Lagrangiana.
La procedura di soluzione del QP è svolta in due fasi: la prima fase coinvolge il calcolo di un punto fattibile (se esiste); la seconda provoca la generazione di una sequenza iterativa di punti fattibili, la quale converge alla soluzione. Mediante questo metodo, è mantenuto un insieme di vincoli attivi per il punto di soluzione.
Virtualmente tutti gli algoritmi QP sono insiemi di metodi attivi. Questo punto è messo in risalto perché esistono metodi differenti, i quali sono molto simili in struttura ma che sono descritti in termini largamente differenti.
La routine constr sfrutta ulteriormente la speciale struttura del problema vincolato. Per esempio essa può mostrare dalle equazioni di Kuhn-Tucker, che l'approssimazione dell'Hessiano del Lagrangiano dovrebbe avere zeri nelle righe e nelle colonne associate con la variabile g. Tuttavia, questo porta unicamente ad un Hessiano positivo semi-definito il quale richiede una più elaborata e quindi lenta tecnica di soluzione QP. Invece l'algoritmo usato inizializza la matrice dell'Hessiano con 1 lungo la sua diagonale eccetto per l'elemento associato a g, il quale è inizializzato con un numero positivo piccolo (es. 1°-10). Attraverso l'ottimizzazione, il codice mantiene zero in tutte le righe e le colonne dell'Hessiano associate con g eccetto l'elemento diagonale, il quale rimane un piccolo numero. Questo permette al codice di usare un veloce e convergente metodo QP positivo e definito, il quale allo stesso tempo sfrutta la struttura speciale del problema.
La routine constr controlla lo stato dell'algoritmo QP nell'ultima colonna della videata di uscita (la colonna chiamata "Procedures"). Generalmente non appare alcuna informazione riportante la positiva definitezza dell'Hessiano. Per Hessiani non definiti positivi, possono essere imposte due modifiche successive per rendere l'Hessiano positivo definito. Se è realizzata la prima modifica, il messaggio Hessian modified appare nella colonna "Procedures". La seconda modifica produce sempre un Hessiano positivo definito e produce il messaggio Hessian modified twice nella colonna "Procedures". Spesso tale messaggio implica che l'ottimizzazione è lontana dalla soluzione o che il problema è particolarmente sensibile a piccole variazioni delle variabili da regolare.
Un problema vincolato non linearmente può spesso essere risolto in qualche iterazione usando un SQP anziché un problema svincolato. Una delle ragioni è dovuta ai limiti dell'area fattibile, l'ottimizzatore può prendere decisioni più dettagliate riguardo la direzione di ricerca e la lunghezza del passo. Questa caratteristica è vantaggiosa dal momento che il calcolo della funzione di costo è computazionalmente molto lungo (richiede la simulazione del sistema).
L'interfaccia di impostazione dei vincoli è riportata in Figura 38.
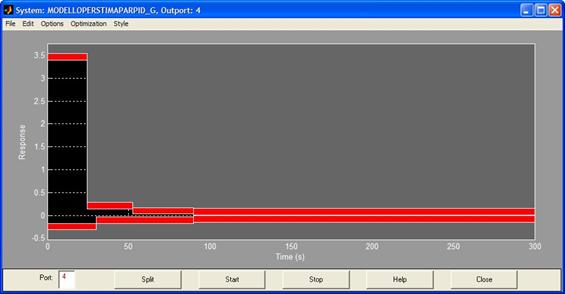
Figura 38. Interfaccia Impostazione Vincoli NCD toolbox
In rosso sono evidenziati i vincoli ai quali l'uscita deve essere adeguata. Tali vincoli possono essere regolati tramite mouse e quindi resi più precisi tramite impostazione numerica con un doppio click su di essi.
Tramite il pulsante "Start" si può dare inizio alla regolazione dei parametri impostati con l'interfaccia apposita selezionabile da "Optimization -> Parameters .".
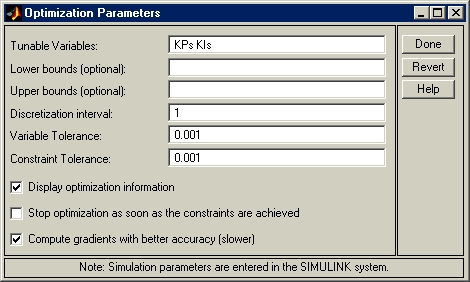
Figura 39. Impostazione Variabili da Regolare
Alla fine della simulazione si avranno nel Workspace corrente i valori cercati per le variabili scelte.
In Figura 40 è riportato il modello utilizzato per la regolazione dei parametri.
Figura 40. Modello Simulink Utilizzato per la Regolazione dei Parametri dei PI
In questo paragrafo verranno presentate le impostazioni assegnate ai vincoli presenti nel blocchetto "NCD Output" per regolare i PI del sistema.
Il PI per il controllo della velocità è stato impostato in modo da mantenere la differenza di velocità dei motori, ovvero motore superiore e motore inferiore, uguale a zero per quanto riguarda gli 'Schemi 2,3,4,5', per quanto riguarda lo 'Schema1' poiché si riferisce al modello indipendente non si tiene conto della differenza di velocità dei due motori, questi operano indipendentemente, ma benzì la differenza di velocità tra quella reale e quella effettivamente calcolata in uscita al motore.
Regolando i parametri in modo da rendere zero la differenza di velocità dei motori si riesce a rendere zero anche la differenza di velocità dei rulli.
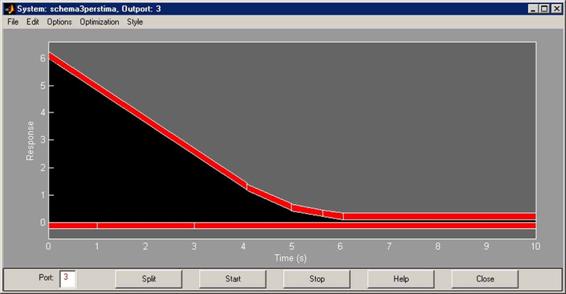
Figura 41. Impostazioni per la Regolazione del PI per Controllo Velocità
La laminazione effettiva inizia dopo 5 secondi e in quel momento la differenza di velocità dei due motori è zero.
I valori dei parametri ottenuti per il PI sono dunque:
![]()
Il controllo proporzionale prevale su quello integrale.
Il PI per il controllo di Corrente è stato regolato in modo da mantenere costante la corrente di alimentazione del motore e poiché i due motori sono squilibrati, hanno momenti d'inerzia diversi, la differenza delle correnti dei due motori rimane costante ma diversa da zero.
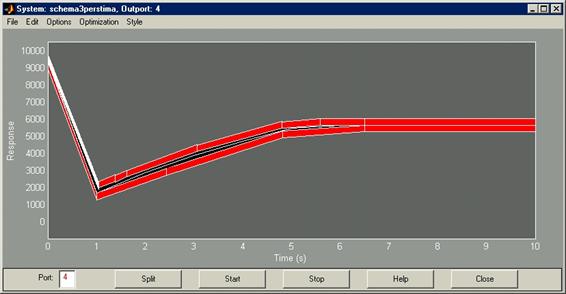
Figura 42. Impostazioni per la Regolazione del PI per Controllo Corrente
I valori dei parametri ottenuti per il controllore sono:

Ho provato a regolare tutti e quattro i parametri contemporaneamente ed i risultati ottenuti non si discostano di molto da questo tipo di regolazione.
In realtà non è un vero è proprio controllore, infatti sono stati inseriti dei vincoli sul segnale in ingresso ai motori in modo da affinare i valori dei parametri trovati mediante il controllo di velocità e di corrente.
In Figura 43 si mostrano i vincoli imposti sul segnale.
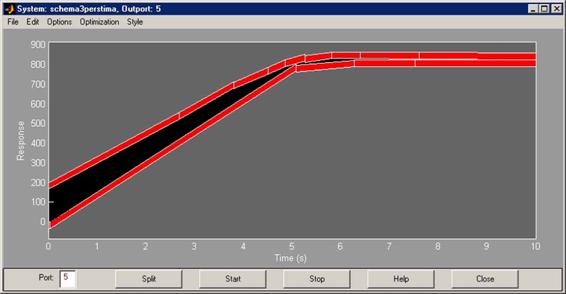
Figura 43. Regolazione PI Tensione
La tensione cresce fino a circa 5 sec poi si stabilizza ad un valore di circe 840 volts , intorno ai 5 secondi presentava forti oscillazioni di ampiezza 100 volts circa che sono state ridotte a 50 volts.
Utilizzando lo 'schema 5', controllo combinato con osservatore del disturbo filtro quasi derivativo e guadagno di anello, la tensione si stabilizza dopo appena 2.5 secondi e riporta delle oscillazioni piccolissime.
I valori dei parametri ottenuti sono dunque:

abbastanza vicini a quelli ricavati con Ziegler-Nichols.
|
| Appunti su: |
|
| Appunti Ingegneria tecnico |  |
| Tesine costruzione |  |
| Lezioni Gestione |  |