|
| Appunti tecniche |
|
|
| Appunti tecniche |
|
| Visite: 1840 | Gradito: |
Leggi anche appunti:Fonti di energia alternative al petrolioFonti di energia alternative al petrolio L'Italia e tutto il Mondo La legge di carica dei condensatoriLa legge di carica dei condensatori SemiconduttoreSEMICONDUTTORE Categoria di materiali presenti in natura allo stato |
 |
 |
In questo paragrafo verranno descritti i tipi di controlli utilizzati e la loro realizzazione in ambiente Simulink sotto Matlab 6.5. E' possibile mediante interfaccia grafica scegliere il tipo di controllo da utilizzare durante la simulazione, la scelta di un controllo comporta il caricamento del relativo schema che lo implementa, questo sarà spiegato meglio nel capitolo 3 relativo all'interfaccia.
Usualmente i motori in continua vengono controllati in tensione in modo indipendente. Ciascun sistema di controllo provvede a mantenere costante la velocità di ciascun rullo in presenza di coppie resistenti diverse sui due rulli, i due sistemi di regolazione indipendenti non garantiscono che le velocità dei rulli si mantengano uguali per cui questo può provocare difetti nel laminato.
Lo schema Simulink che implementa il controllo indipendente è riportato in Figura 16:
Figura 16. Controllo indipendente
Una possibile soluzione per ovviare ai problemi riscontrati con l'utilizzo del Controllo Indipendente può essere quella di modificare il sistema di controllo introducendo un anello di reazione che invia al regolatore di velocità un segnale proporzionale alla differenza di velocità tra i rotori dei due motori, in modo da rallentare il rullo più veloce ed accelerare quello più lento, questo viene chiamato Controllo Combinato ('schema2').
Per utilizzare il Controllo Combinato viene caricato uno schema Simulink totalmente cambiato ' Schema 2' riportato in Figura 17 , Figura 18 e Figura 19 :
Figura 17. Schema Controllo Combinato
Figura 18. Blocchetto Controllo Combinato di velocità
In ingresso al blocchetto abbiamo la velocità di riferimento, la velocità del motore che agisce sull'altro rullo e la velocità in uscita al motore del rullo che sto considerando, in questo modo il controllo è combinato infatti, come si vede dal modello sottostante si esegue la differenza delle velocità dei due motori imponendo che sia zero in modo da farli andare alla stessa velocità.
Figura 19. Schema Simulink Controllo Combinato
Considerando che in uscita ai controllori sono posti dei saturatori per limitare l'ampiezza dei segnali di controllo si è pensato di introdurre un azione a 'struttura variabile ' in grado di gestire meglio la presenza dei saturatori.
La teoria del controllo ottimo suggerisce una soluzione ottimale di tipo relè o bang-bang.
E' d'altra parte noto che la presenza di incertezze parametriche non consente un' efficace implementazione di tale controllo ottimo ed il sistema a ciclo chiuso tende a produrre cicli limiti e fenomeni indesiderati, quale il chattering con una richiesta inaccettabile di larghezza di banda per gli attuatori.
Storicamente i primi controllori industriali sono stati realizzati come regolatori tutto-niente.
La successiva introduzione di regolatori PID ha soppiantato i vecchi; nonostante ciò occorre considerare che la realizzazione ad esempio dell'azione proporzionale comporta la scelta del guadagno, ma anche dei limiti di ampiezza del segnale di uscita.
Se si
considera una realizzazione di tipo software dell'azione proporzionale, appare
chiaro che la scelta del guadagno ![]() e dei limiti massimo e
minimo del segnale di uscita
e dei limiti massimo e
minimo del segnale di uscita ![]() equivalgono a fissare
un legame del tipo:
equivalgono a fissare
un legame del tipo:
![]()
Ne segue che al divergere del guadagno all'infinito l'azione proporzionale si riduce a quella di relè.
Con le
implementazioni attuali di tipo numerico è quindi possibile realizzare un
regolatore in cui sia l'ampiezza ![]() , che il guadagno
, che il guadagno ![]() siano variabili in
funzione di opportune grandezze.
siano variabili in
funzione di opportune grandezze.
Poiché le tecniche del controllo a struttura variabile consentono di progettare sistemi con alte prestazioni ed elevata insensibilità ai disturbi e alle variazioni parametriche, appare evidente che conviene intervenire sulla struttura dei regolatori standard in modo da recuperare gli aspetti positivi del controllo a struttura variabile.
Si perviene così a controllori standard a struttura variabile (VS-PI).
La logica che sottintende tali azioni è abbastanza semplice.
Con riferimento al VS-PI si può osservare che:
Qualora
il segnale di errore sia molto grande, cioè dello stesso ordine o maggiore del
livello di saturazione ![]() dell'impianto,
l'azione integrale è non necessaria, mentre l'azione proporzionale è massima.
Compatibilmente con la stabilità l'azione proporzionale fornirà il massimo
segnale di ingresso ammissibile per l'impianto, se si desidera minimizzare il
tempo di risposta;
dell'impianto,
l'azione integrale è non necessaria, mentre l'azione proporzionale è massima.
Compatibilmente con la stabilità l'azione proporzionale fornirà il massimo
segnale di ingresso ammissibile per l'impianto, se si desidera minimizzare il
tempo di risposta;
Qualora il segnale di errore sia piccolo, allora l'azione integrale deve essere efficace, mentre l'azione proporzionale deve consentire la stabilità del sistema.
Ne segue che una possibile implementazione di un regolatore VS-PI è la seguente:
Il segnale di uscita del controllore vale:
Nel caso particolare di questa applicazione non è stata implementata la struttura variabile sul proporzionale in quanto non forniva miglioramenti significativi.
L'azione proporzionale passa con regolarità da una azione tipo relè, nel caso di segnale di errore molto grande, ad una classica azione proporzionale per piccoli valori dell'errore.
L'azione integrale viene in pratica bloccata se l'errore è molto alto, mentre è operativa per bassi valori dell'errore.
Il fenomeno del wind-up (saturazione degli attuatori) risulta eliminato in modo naturale con l'adozione del regolatore VS-PI.
Va osservato che, qualora il segnale di riferimento subisca delle grosse variazioni, allora l'azione integrale risulta inibita.
Ciò comporta che l'uscita dell'integratore non cambia, con conseguente allungamento dei tempi di risposta per pervenire alla nuova condizione di regime.
In tal caso (errore molto alto) è opportuno prevedere un azzeramento dell'uscita dell'integratore.
L'attivazione di un tale algoritmo comporta l'eliminazione dell'azione integrale nel caso in cui l'ingresso sia un segnale alternativo ad alta frequenza.
Per utilizzare il Controllo Combinato a struttura variabile deve essere caricato lo 'schema3' riportato in Figura 20, Figura 21, Figura 22, Figura 23 e Figura 24:
Figura 20. Schema Controllo Combinato a struttura variabile
Figura 21. Blocchetto Controllo Combinato, a struttura variabile ,di velocità
In ingresso al blocchetto abbiamo la velocità di riferimento, la velocità del motore che agisce sull'altro rullo la velocità in uscita al motore del rullo che sto considerando e l'uscita dell'osservatore, in questo modo il controllo è combinato infatti, come si vede dal modello sottostante si esegue la differenza delle velocità dei due motori imponendo che sia zero in modo da farli andare alla stessa velocità.
Figura 22. Blocchetto Simulink Controllo Combinato a struttura variabile
Figura 23.Blocchetto Simulink Controllo Combinato, a struttura variabile, di velocità
Figura 24. Blocchetto PI Controllo Combinato a struttura variabile
Nel blocchetto PI del controllo di velocità e corrente è realizzato il controllo a struttura variabile, come detto sopra la struttura variabile è presente solo sull'azione integrale.
Sono
state effettuate simulazioni per la stima del parametro ![]() e si è ottenuto che:
e si è ottenuto che:
![]()
Con
questo valore abbiamo una buona tensione di comando (![]() ), con piccole oscillazioni.
), con piccole oscillazioni.
Comunque c'è la possibilità di cambiare il valore del parametro da WorkSpace.
Un ulteriore soluzione al problema si ottiene modificando lo schema precedente adottando un osservatore del disturbo (schema4), che consente uno smorzamento energetico delle oscillazioni torsionali tra rotore e rullo dovute alla elasticità delle allunghe, mediante un segnale di reazione costituito dalla derivata della coppia torsionale stimata a partire dalla conoscenza della velocità del rotore e della corrente del motore. Se la funzione di trasferimento dell'anello di corrente si ipotizza unitaria e si considerano i derivatori ideali si possono scrivere le seguenti equazioni:
![]()
![]()
![]()
Risolvendo
per ![]() si ottiene:
si ottiene:
Il massimo smorzamento si ha per:
Affinché l'osservatore sia efficace occorre che l'anello di corrente abbia una dinamica sufficientemente elevata per rispondere bene al segnale di feedback introdotto. Ciò si ottiene alimentando il motore con un chopper.
Per utilizzare il Controllo Combinato con osservatore deve essere caricato lo 'schema4' riportato in Figura 25, Figura 26, Figura 27, Figura 28 e Figura 29:
Figura 25. Schema Controllo Combinato con osservatore
Figura 26. Blocchetto Controllo Combinato di velocità
In ingresso al blocchetto abbiamo la velocità di riferimento, la velocità del motore che agisce sull'altro rullo la velocità in uscita al motore del rullo che sto considerando e l'uscita dell'osservatore, in questo modo il controllo è combinato infatti, come si vede dal modello sottostante si esegue la differenza delle velocità dei due motori imponendo che sia zero in modo da farli andare alla stessa velocità.
Figura 27. Blocchetto Simulink Controllo Combinato con osservatore
Figura 28. Blocchetto Simulink osservatore
In
ingresso all'osservatore abbiamo la corrente del motore e la velocità del
rotore ed in uscita la derivata della coppia torsionale ![]() .
.
Figura 29. Blocchetto Simulink Controllo Combinato di velocità
All'uscita
del PID viene sottratta la derivata della coppia torsionale ![]() .
.
Visti i risultati ottenuti con l'utilizzo di un Controllo Combinato con osservatore ho deciso di implementare una nuova soluzione.
In particolare con il precedente controllo si sono riscontrate forti oscillazioni nella velocità dei cilindri e la tensione di comando al motore oscilla in maniera considerevole prima di assumere un andamento costante quindi si è resa necessaria la ricerca di una diversa implementazione.
Il nuovo modello considera il Laminatoio come un sistema a due masse (vedi Figura 30) tenendo conto della coppia torsionale presente tra il motore ed il carico (nel nostro caso i cilindri) dovuta al fatto che l'allunga compie delle piccole torsioni.
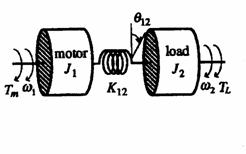
Figura 30. Sistema a 2-masse del Laminatoio
Questo controllo consiste in tre semplici elementi: l'osservatore del disturbo, un filtro quasi derivativo e il guadagno di anello.
Aggiustando adeguatamente il guadagno di anello si può controllare il fattore di disturbo del sistema originale cosicché le vibrazioni causate dalla risonanza meccanica possono essere annientate.
La combinazione di questo metodo con l'utilizzo di regolatori PI mostra una buona soppressione delle vibrazione e reiezione del disturbo.
La coppia torsionale si presenta nei sistemi dove il carico (i cilindri) è collegato al motore mediante una lunga asta (allunga).
L'elasticità piccola dell'allunga genera delle vibrazioni sulla velocità del carico.
Queste vibrazioni non sono solo indesiderabili ma sono anche, in alcuni casi, l'origine della instabilità del sistema.
Questo controllo è stato introdotto per migliorare i requisiti del sistema ovvero:
La novità introdotta sta nel fatto di considerare non solo la frequenza di risonanza del sistema ma anche il rapporto di risonanza dato da:
![]()
dove ![]() rappresenta la
frequenza di antirisonanza e
rappresenta la
frequenza di antirisonanza e ![]() la frequenza di
risonanza.
la frequenza di
risonanza.
Il modello del sistema a 2-masse ha la seguente equazione di stato:
![]()
dove:
A =
![]()
![]()
doveJ1l
e J2l sono rispettivamente il momento d'inerzia del motore e del carico e ![]() è la costante di rigidezza dell'allunga.
è la costante di rigidezza dell'allunga.
Il vettore delle variabili di stato è:
![]()
dove ![]() è la velocità del
motore e
è la velocità del
motore e ![]() è la velocità del
cilindro che deve essere controllata.
è la velocità del
cilindro che deve essere controllata.
La
frequenza meccanica di risonanza ![]() e la frequenza
di antirisonanza
e la frequenza
di antirisonanza ![]() sono una
caratteristica importante per il sistema a 2-masse.
sono una
caratteristica importante per il sistema a 2-masse.
Queste sono calcolate dai poli e zeri della funzione di trasferimento:
![]()

il rapporto di queste due frequenze
è chiamato rapporto di risonanza.
L'osservatore
del disturbo applicato al sistema a 2-masse stima la coppia torsionale ![]() ( vedi Figura
31) che è reazionata dal motore, la stima della coppia
torsionale viene poi filtrata da un filtro passa basso, il guadagno di anello
smorza l'effetto delle vibrazioni della risonanza meccanica.
( vedi Figura
31) che è reazionata dal motore, la stima della coppia
torsionale viene poi filtrata da un filtro passa basso, il guadagno di anello
smorza l'effetto delle vibrazioni della risonanza meccanica.
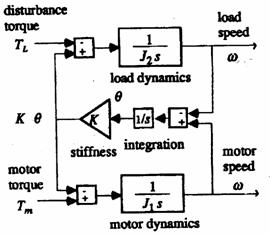
Figura 31. Schema del calcolo della coppia torsionale
Mediante la retroazione del filtro quasi derivativo e della coppia torsionale, la funzione di trasferimento T(s) cambia in:
possiamo
conoscere il limite superiore per ![]() , dipende dai parametri del sistema, aumentando il guadagno
di anello due dei tre poli gradatamente si allontanano dall'asse immaginario ed
il sistema si smorza (Figura
32) finché è soddisfatta:
, dipende dai parametri del sistema, aumentando il guadagno
di anello due dei tre poli gradatamente si allontanano dall'asse immaginario ed
il sistema si smorza (Figura
32) finché è soddisfatta:
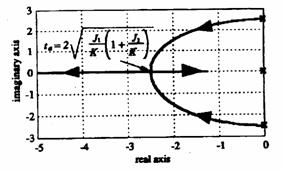
Figura 32. Luogo delle radici
quando
![]() supera
supera ![]() , la risposta della coppia motore diventa più lenta finché
uno dei poli dominanti ritorna verso l'asse immaginario.
, la risposta della coppia motore diventa più lenta finché
uno dei poli dominanti ritorna verso l'asse immaginario.
Per utilizzare il Controllo Combinato con osservatore del disturbo, filtro quasi derivativo e guadagno ad anello deve essere caricato lo 'schema5' riportato in Figura 33, Figura 34, Figura 35 e Figura 36 :
Figura33. Schema Controllo Combinato con osservatore del disturbo, filtro derivativo affetto da errore e guadagno di anello
Figura34. Blocchetto Controllo Combinato di velocità con osservatore del disturbo, filtro quasi derivativo e guadagno ad anello
In ingresso al blocchetto abbiamo la velocità di riferimento, la velocità del motore che agisce sull'altro rullo la velocità in uscita al motore del rullo che sto considerando e l'uscita dal feedback gain block che mi da la stima della coppia torsionale, in questo modo il controllo è combinato infatti, come si vede dal modello sottostante si esegue la differenza delle velocità dei due motori imponendo che sia zero in modo da farli andare alla stessa velocità.
Figura 35. Blocchetto Simulink Controllo Combinato con osservatore del disturbo, filtro quasi derivativo e guadagno ad anello
All'uscita
dell'osservatore del disturbo ho la stima della coppia torsionale ![]() , questa viene filtrata mediante un filtro passa basso e poi
moltiplicata per una costante
, questa viene filtrata mediante un filtro passa basso e poi
moltiplicata per una costante ![]() , calcolata all'interno del relativo blocchetto, il cui
valore tende a smorzare le vibrazioni del sistema.
, calcolata all'interno del relativo blocchetto, il cui
valore tende a smorzare le vibrazioni del sistema.
Nel
modello è presente la possibilità di inserire un altro valore per ![]() , ricordando che tale
valore deve essere inferiore a
, ricordando che tale
valore deve essere inferiore a ![]() calcolato all'interno
del blocchetto Ta, tale valore viene caricato nel modello spostando manualmente
uno switch.
calcolato all'interno
del blocchetto Ta, tale valore viene caricato nel modello spostando manualmente
uno switch.
Da
notare che poiché i momenti d'inerzia dei due motori sono diversi i valori di ![]() sono diversi per
l'azionamento superiore ed inferiore.
sono diversi per
l'azionamento superiore ed inferiore.
Il tutto va in ingresso al controllore di velocità.
 Figura 36. Blocchetto Simulink Controllo
Combinato di velocità con osservatore del disturbo, filtro quasi derivativo e
guadagno ad anello
Figura 36. Blocchetto Simulink Controllo
Combinato di velocità con osservatore del disturbo, filtro quasi derivativo e
guadagno ad anello
|
| Appunti su: |
|
| Appunti Gestione |  |
| Tesine Ingegneria tecnico |  |
| Lezioni costruzione |  |